Droga W Ruchu Opóźnionym

Ruch opóźniony to ruch, w którym prędkość ciała maleje w czasie, a przyspieszenie ma kierunek przeciwny do kierunku prędkości. Inaczej mówiąc, ciało zwalnia.
Kluczowym aspektem ruchu opóźnionego jest przyspieszenie ujemne. Oznacza to, że wartość przyspieszenia, która mówi o tempie zmiany prędkości, jest mniejsza od zera. Matematycznie, przyspieszenie (a) jest wyrażone jako zmiana prędkości (Δv) podzielona przez zmianę czasu (Δt): a = Δv / Δt. W ruchu opóźnionym Δv jest ujemne.
Prędkość w ruchu opóźnionym maleje liniowo, jeśli przyspieszenie jest stałe. Można ją obliczyć za pomocą wzoru: v(t) = v0 + at, gdzie v(t) to prędkość w czasie t, v0 to prędkość początkowa, a a to przyspieszenie (ujemne).
Must Read
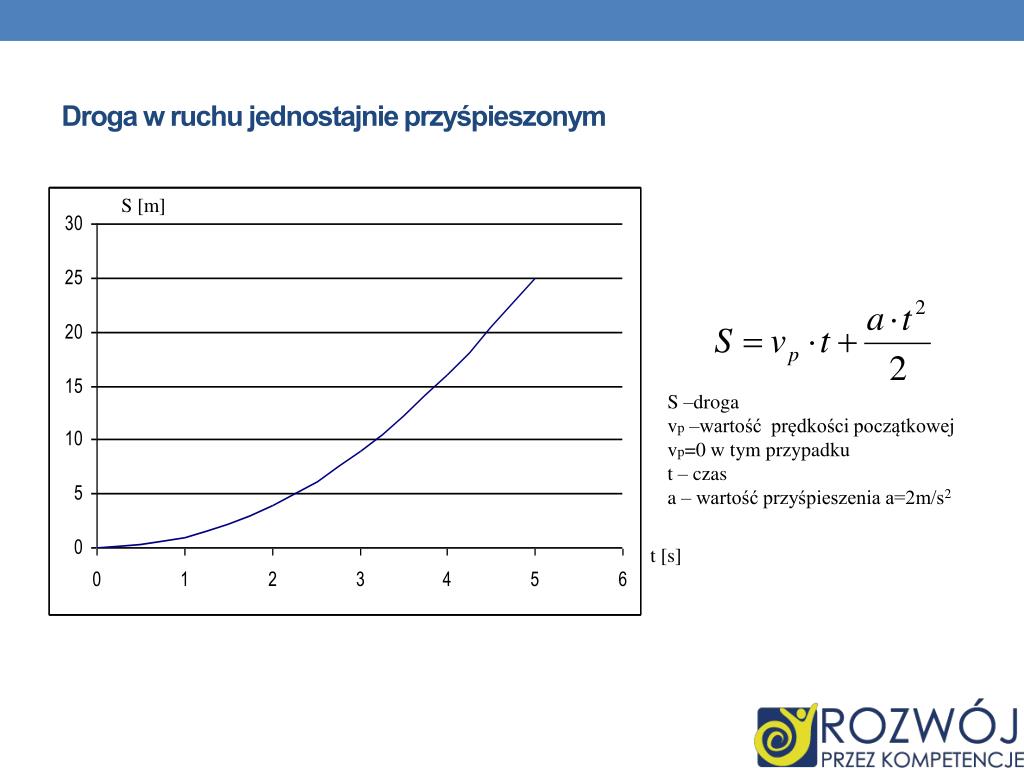
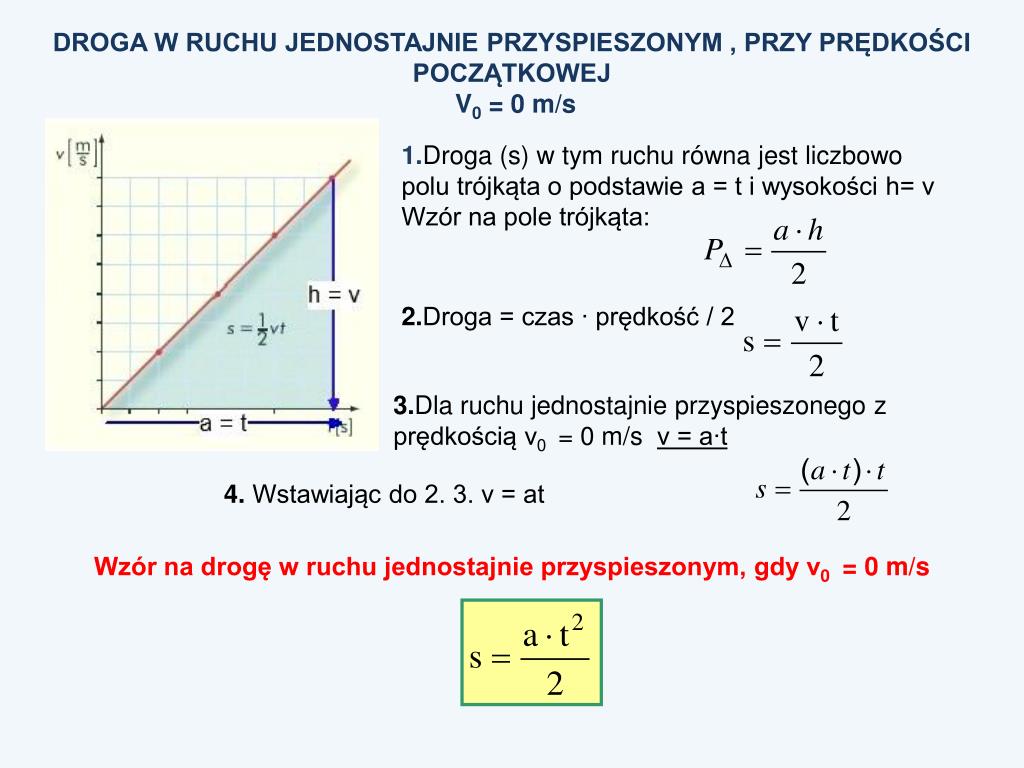
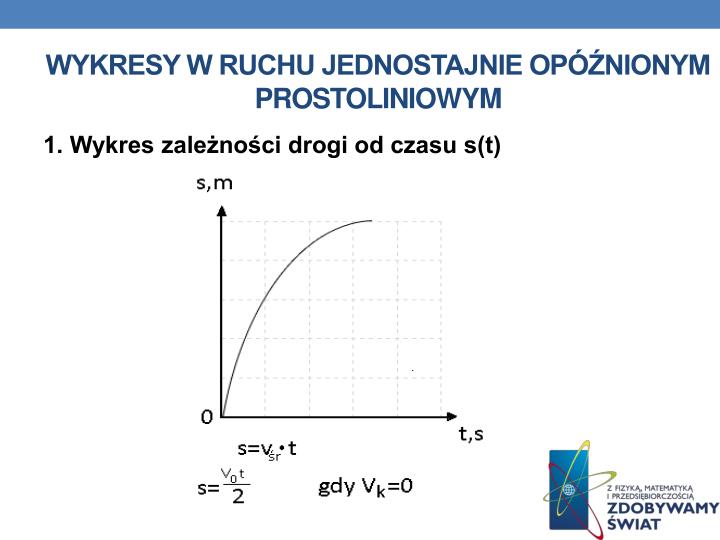
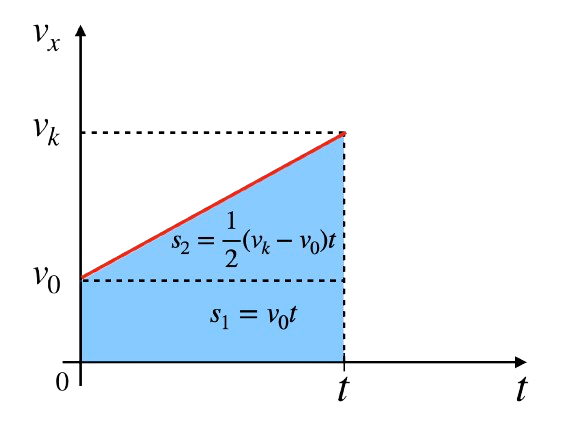
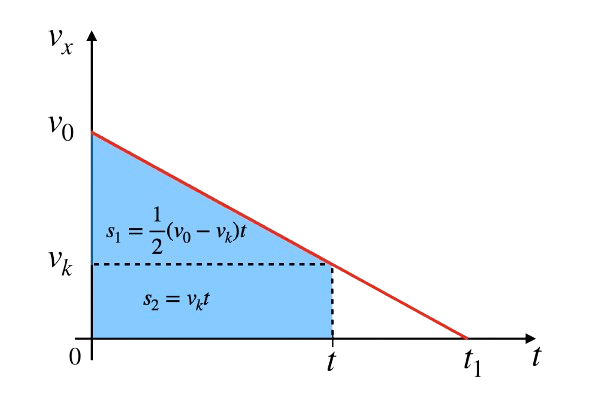
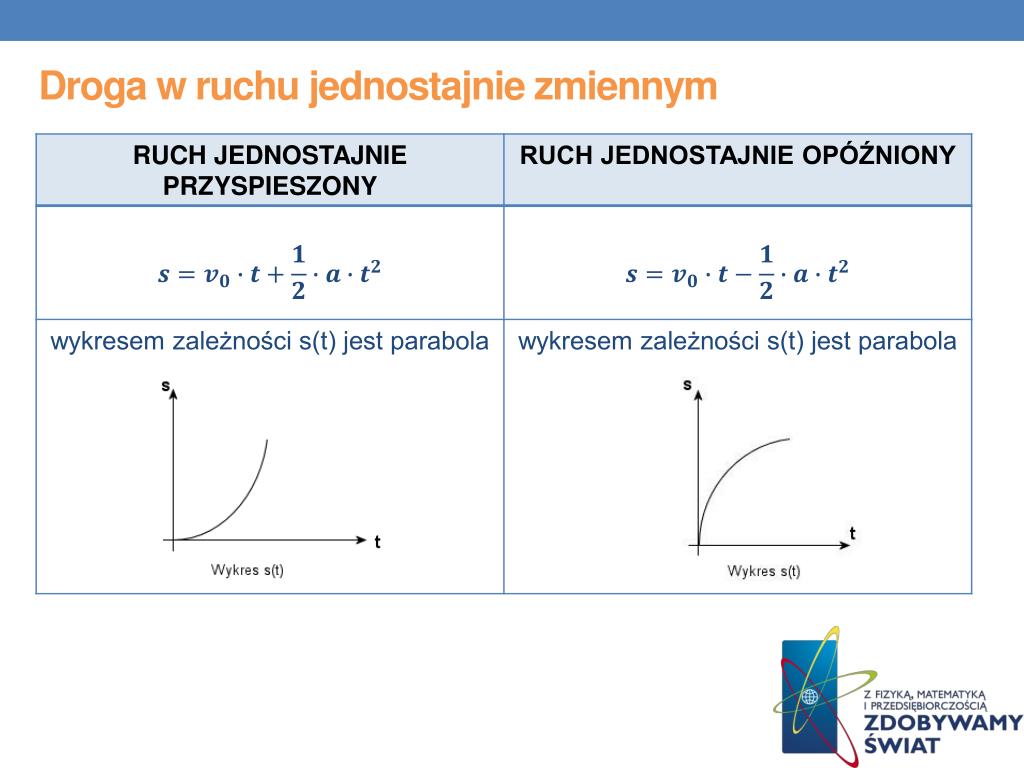
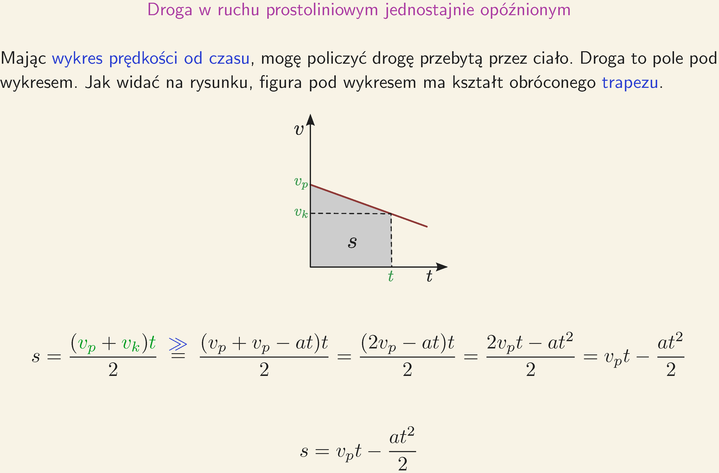
Droga przebyta w ruchu opóźnionym zależy od prędkości początkowej, przyspieszenia i czasu. Można ją obliczyć za pomocą wzoru: s(t) = v0t + (1/2)at2. Warto zauważyć, że droga przestaje rosnąć, gdy prędkość spadnie do zera.
Przykład 1: Samochód hamuje przed światłami. Jego prędkość początkowa wynosi 20 m/s, a przyspieszenie (ujemne) hamowania to -2 m/s2. Zatem prędkość maleje w czasie.
Przykład 2: Piłka rzucona pionowo w górę doświadcza ruchu opóźnionego wznosząc się. Przyspieszenie ziemskie działa w dół, przeciwnie do początkowej prędkości piłki.
Ruch opóźniony znajduje szerokie zastosowanie w inżynierii i projektowaniu, np. w systemach hamowania pojazdów, gdzie precyzyjne obliczenia opóźnienia są kluczowe dla bezpieczeństwa. Zrozumienie tego ruchu pozwala na projektowanie efektywnych i bezpiecznych systemów.